

Developing a module to allow UAV harvesting of measurements from stations at remote measurement sites
Faculty
Departments
Partners
Students
Locations
Project Topics
Funding Sources
Abstract
It is quite difficult to collect data from remote sensors on foot. The condition of the terrain may affect someone who may have placed a sensor in hard to reach areas. In this project we will develop a system that will gather specific data (i.e. temperature, moisture or air quality) and send it back to the user. Our board will be placed on a drone so the user doesn’t have to make a trip to every sensor in the network because the drone will make the trip for them. Our board will be able to distinguish each sensor and we will develop unique algorithms to determine how it interacts with each sensor. After completing this project, our system will be deployed at one of Sonoma State’s nature preserves.
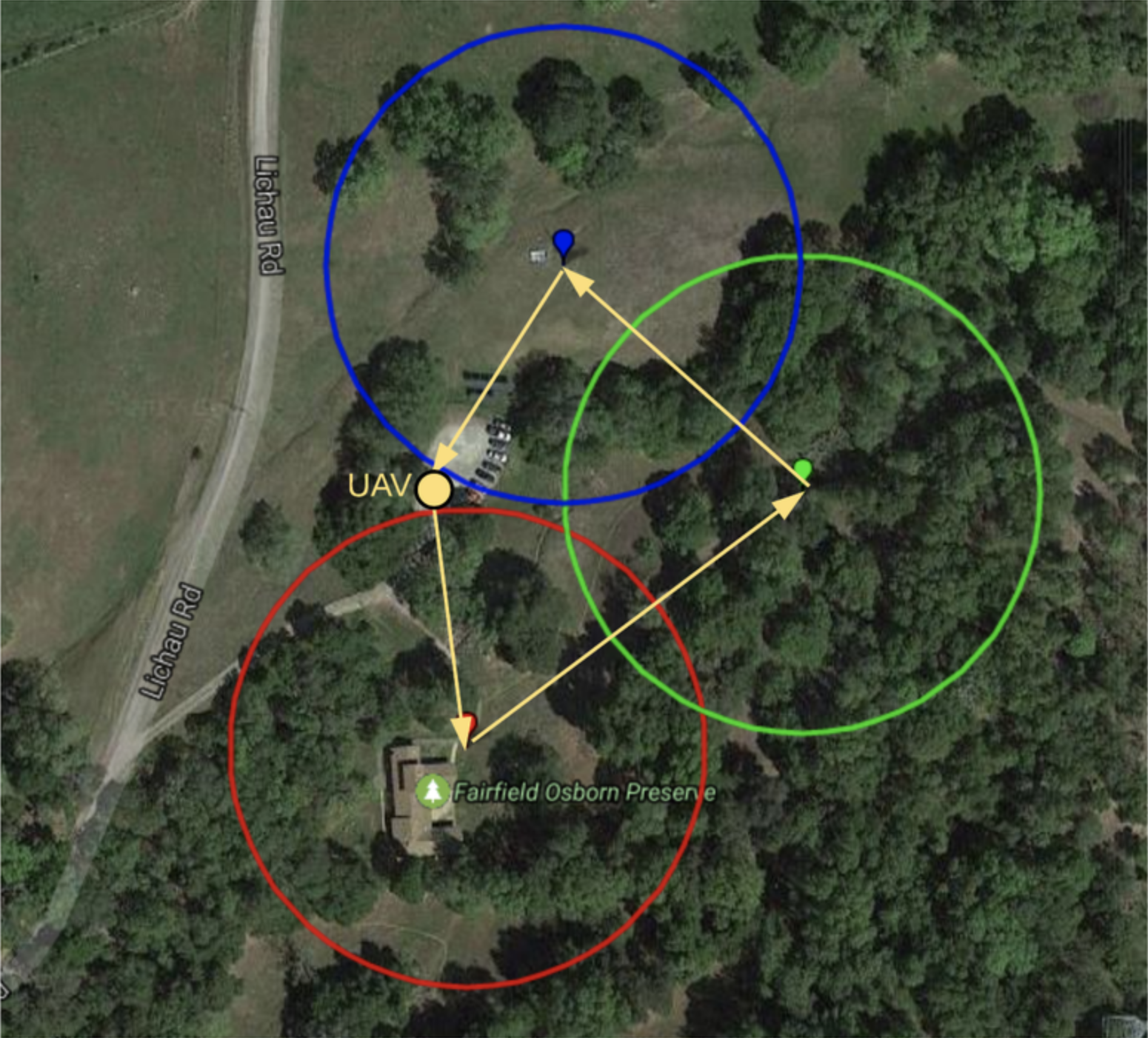
In our final test, we mounted the mobile node to a UAV and set it to autonomously fly to the three nodes. We set the mobile node to begin transmission at 200 ft. Each sensor node was placed at various locations at the Fairfield Osborn Preserve in Rohnert Park, Ca.
The UAV was able to successfully fly to each, it hovered for 10 seconds at each node to ensure a complete transmission. We ran into few problems involving power to the third sensor node and receiving power from the UAV to the mobile node. After a few hours of troubling shooting the problems, we were able to do a successful test, gathering real sensor data from each node.
Results
| Title | Format | Download | Students |
|---|---|---|---|
| Mobile Data Harvester | website | Mobile Data Harvester | Taylor Jones, Abe Palmerin, Joshua Papanicolas |
Key Terms: drone, environmental technology, node, LaTex, ZigBee, Xbee, antenna, microcontroller